关于offboard模式下给飞控传的到底是什么数据
本文共 446 字,大约阅读时间需要 1 分钟。
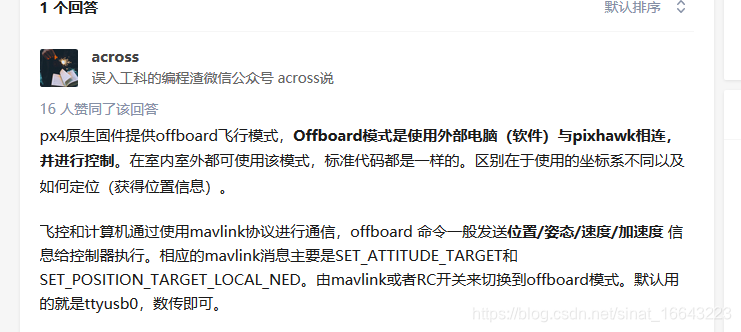
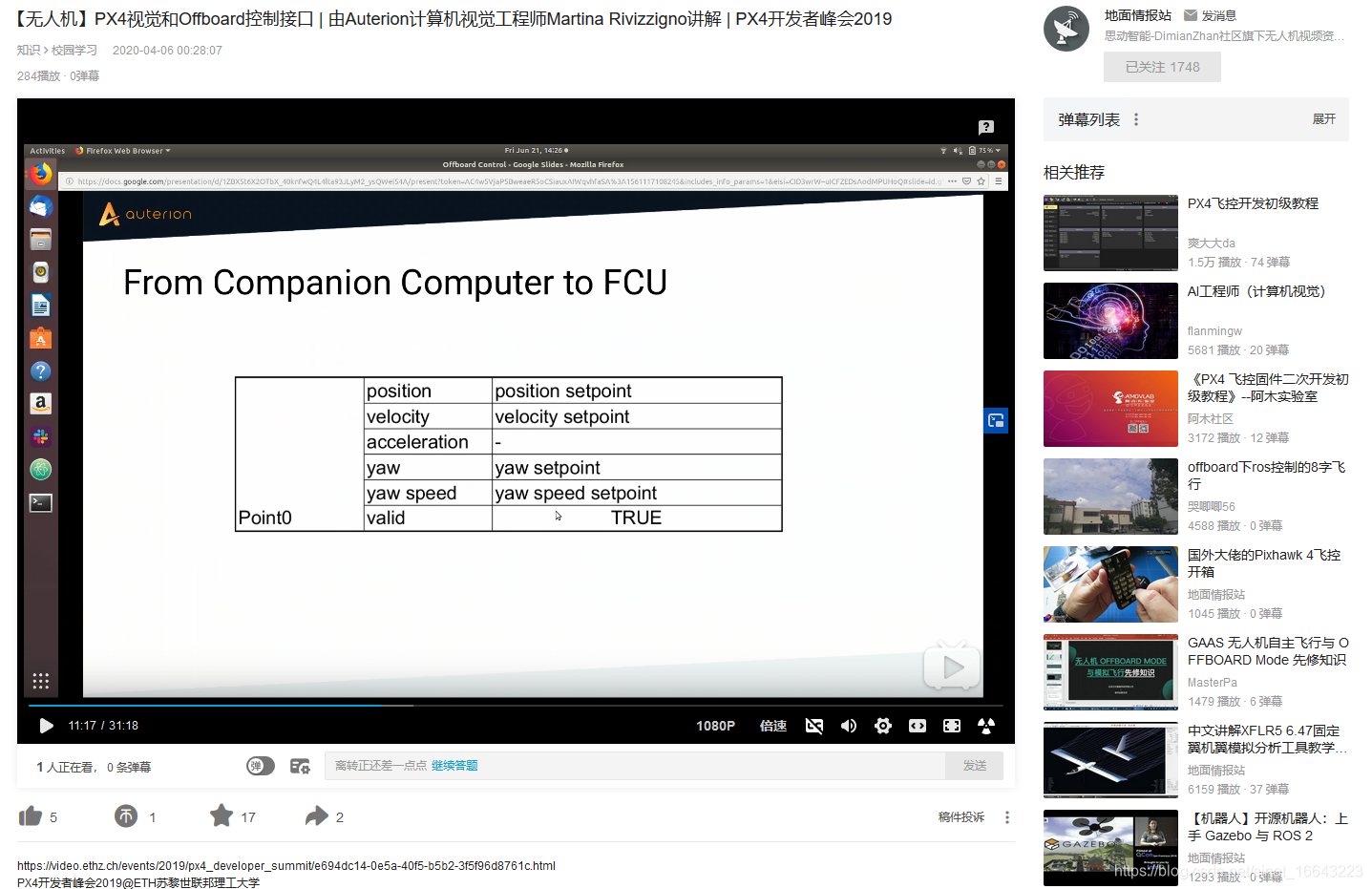
官方这个只用传个pose就可以了,也就是坐标点(0.0.2)它就可以飞到2米高的地方,但问题是,这估计是基于GPS的
我要是基于双目SLAM的呢,定位信息是不是也要通过MAVROS发给飞控呢?期望位置要发这个可以确定,那这个定位信息是怎么发的?所以最后程序是怎么写的?
这是我一直一来没有弄清楚的东西。
我推理应该是当前位置和目标位置信息都需要发送才行,不然无人机不可能完成相应的任务啊。
![]()


这里也是说
这个消息,是否offboard模式下和PX4通信就是这个格式的数据


这是MAVROS的中文维基里面的,看来这两种信息确实很重要。不过它应该还是可以发送其他数据的,可能主要发送这么两种。
一个6.14 一个6.15
attitude是姿态的意思。



实际MAVROS应该可以发送这么多种数据的
across也这么说



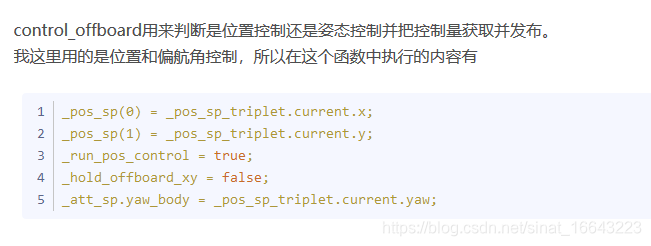
似乎就是要么位置控制要么姿态控制,本身无人机就是位置环+姿态环



ZN无人机课程里面的transfer.py也是这样。
这也说明PX4确实是接收到这个当前的位置信息的。
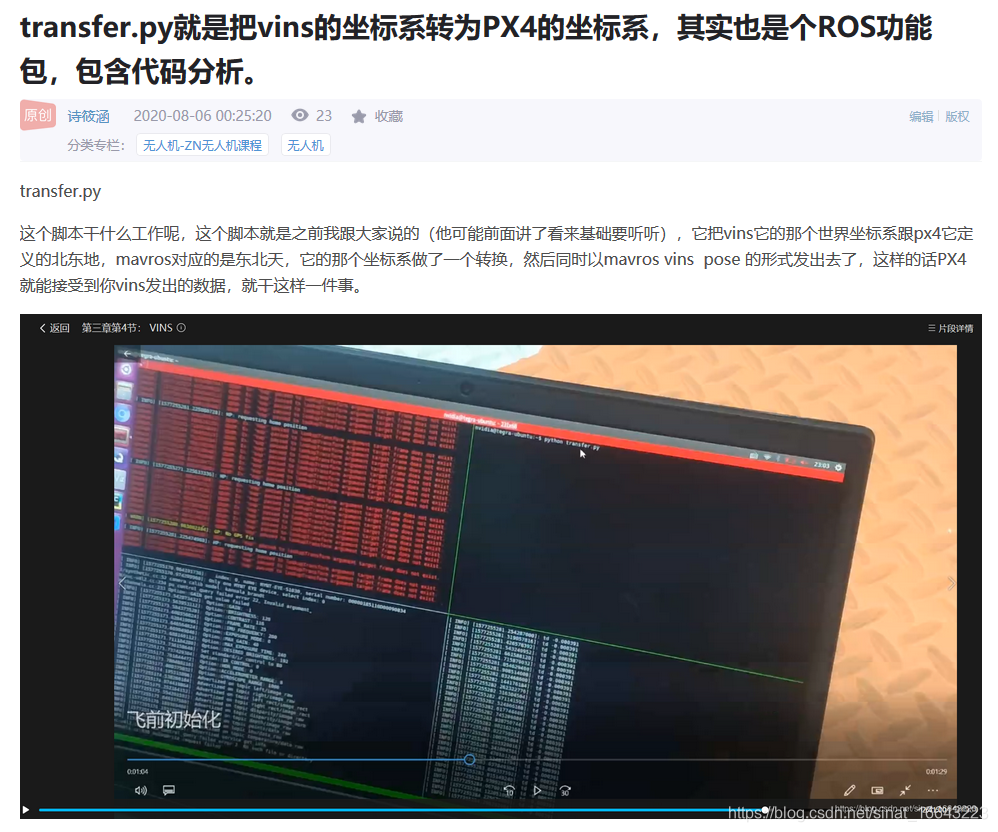

最新的发现
![]()
转载地址:http://iklni.baihongyu.com/
你可能感兴趣的文章
if __name__ == ‘__main__‘:就是Python里的main函数,脚本从这里开始执行,如果没有main函数则从上到下顺序执行。
查看>>
PX4官方用户和开发手册的首页面是会给你选择英文和中文的
查看>>
网络协议栈我是不是可以这么理解,就是把你要发送的数据自动处理成TCPIP格式的消息发出去,这种底层的转换不需要你弄了。
查看>>
除了LwIP还有uIP
查看>>
《跟工程师学嵌入式开发》这本书最后的终极项目我反而觉得有说头
查看>>
博士的申请考核制
查看>>
那些硬件的初始化函数主要是在做些上什么?
查看>>
MAVLink学习之路05_MAVLink应用编程接口分析(也有讲STM32下的收发函数)
查看>>
找到了中文版的mavlink手册
查看>>
浅谈飞控开发的仿真功能
查看>>
我觉得在室内弄无人机开发装个防撞机架还是很有必要的,TBUS就做得很好。
查看>>
serial也是见到很多次了,似乎它就是一种串行通信协议
查看>>
TBUS的一些信息
查看>>
PX4+激光雷达在gazebo中仿真实现(古月居)
查看>>
专业和业余的区别就在于你在基础在基本功打磨练习花的时间
查看>>
通过mavlink实现自主航线的过程笔记
查看>>
Ardupilot飞控Mavlink代码学习
查看>>
这些网站有一些嵌入式面试题合集
查看>>
我觉得刷题是有必要的,不然小心实际被问的时候懵逼,我觉得你需要刷个50份面试题。跟考研数学疯狂刷卷子一样!
查看>>
我觉得嵌入式面试三要素:基础吃透+项目+大量刷题,缺一不可。不刷题是不行的。而且得是大量刷,刷出感觉套路,别人做题都做得是固定题型套路条件反射了,你还在那慢慢理解慢慢推是不行的,也是考研的教训。
查看>>